 网站地图
网站地图


-
在工程应用和日常生活中,常需要测量液位值,用于液位测量的装置或传感器类型较多,包括:差压式、电极式、浮体式、电容式、超声波式、激光式、雷达式、光纤式、光电式和核辐射式等类型[1],其中电容液位传感器具备响应速度快、灵敏度较高、环境适应性强的优点,广泛用于液位测量工程中[2]。常见的电容液位传感器多采用双筒式结构,使用两个同轴的金属圆筒作为电容器的内、外电极,两个电极之间的液体及液面上方的空气作为介质,当液位变化时,混合介质的介电常数也随之变化,从而使传感器的电容量发生变化[3]。由于结构特征,双筒式电容液位传感器在测量时电极部分需浸入液体中,这种接触式测量方式限制了它的应用范围,在对导电液体、强腐蚀液体、医疗用液体等进行液位检测时,并不适合采用接触式测量方式。随着边缘电场理论的不断完善与发展, 基于边缘电场原理设计的平面电容传感器成为土壤含水量检测、pH值测量等的典型传感器[4],美国德州仪器公司提出利用平面电容检测原理进行液位测量,可实现非接触式测量液位[5],但国内在利用平面电容传感器检测液位方面的研究非常少。除此以外,目前市售的液位计产品一般可测量0m~200m的液位高度,测量精度多为0.5级,但产品都存在测量盲区,测量盲区一般是0mm~50mm液位段。若要用普通液位计来测量小容量、低液位如墨盒、药水等的液位值,它们的液位正处于测量盲区内,无法进行准确测量。
针对以上问题,为了实现较低液位的测量,采用平面电容传感器来感测液位变化,平面电容粘贴在容器外壁上,不接触液体,可实现非接触测量,并且平面电容传感器没有测量盲区,适于测量0mm~300mm的液位[6]。系统中除了平面电容传感器检测液位变化,还利用28位电容-数字转换器FDC2214处理传感器输出的信号,单片机ATmega328P根据FDC2214的处理结果计算液位数值,并通过串口输出测量结果。
-
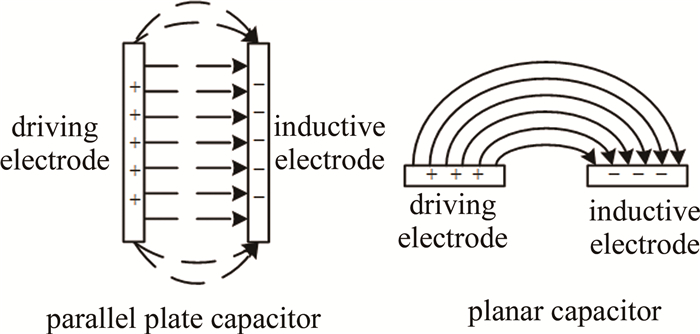
平面电容传感器是基于电容边缘效应的传感器,它相当于把平行板电容器的两极板向两边展开,使其位于同一平面[7],两个金属极板分别为驱动电极和感应电极,给驱动电极施加激励信号,两个电极之间产生边缘电场,电场线从驱动电极指向感应电极,穿透被测物体,并在驱动电极和感应电极之间产生电容值[8-9],图 1为平行板电容器和平面电容器的示意图。
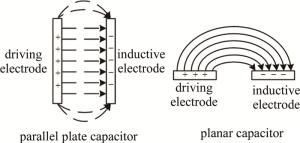
Figure 1. Parallel plate capacitor and planar capacitor schematic diagram
-
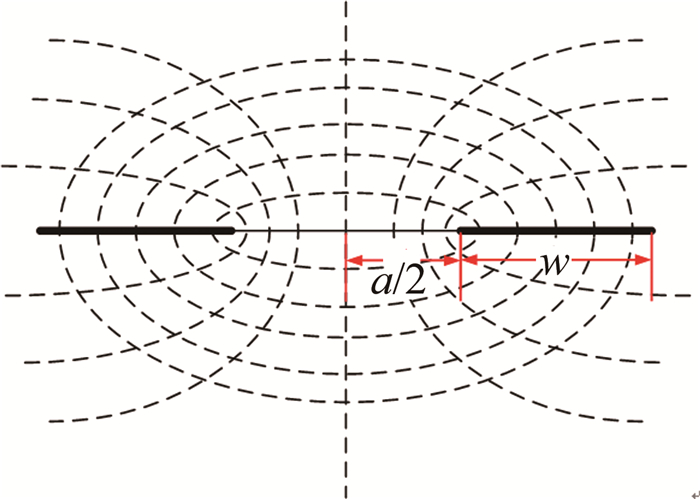
平面电容传感器的主要结构参量有电极长度、电极宽度、电极厚度、两个电极的间距,关键性能指标有灵敏度、穿透深度、信号强度[10],研究结构参量对性能指标的影响,有助于优化平面电容传感器的设计,提高传感器性能[11]。图 2为平面电容的2维电场示意图。参考文献[12]中提出利用保角映射和反余弦变换法解析平面电容的2维电场,再结合高斯定理,推导出平面电容值的函数。
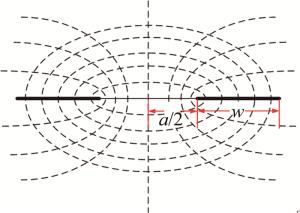
Figure 2. Two dimensional electric field of planar capacitance schematic diagram
平面电容两个矩形金属电极材料和尺寸相同,设电极的宽度为w,长度为l,且l$\gg $w,电极间距为a,电极厚度为t,平面电容值表示为:
$ C = \frac{{2{\varepsilon _{\rm{r}}}{\varepsilon _0}l}}{{\rm{ \mathsf{ π} }}}\ln \left[ {\left( {1 + \frac{{2w}}{a}} \right) + \sqrt {{{\left( {1 + \frac{{2w}}{a}} \right)}^2} - 1} } \right] $
(1) 式中, ε0为真空介电常数,εr为电容介质(被测物体)的相对介电常数。$\left(1+\frac{2 w}{a}\right)=\frac{a+2 w}{a}$, 设b=(a+2w),则b为两个电极外边缘的宽度,平面电容值又等于[12]:
$ C = \frac{{2{\varepsilon _{\rm{r}}}{\varepsilon _0}l}}{{\rm{ \mathsf{ π} }}}\ln \left[ {\frac{b}{a} + \sqrt {{{\left( {\frac{b}{a}} \right)}^2} - 1} } \right] $
(2) (1) 式和(2)式表明,电极宽度越大、电极间距越小,传感器的有效电容值越大,信号强度越大,且电极间距的影响更明显[13]。平面电容电场的穿透深度与电容结构参量的关系可表示为:
$ T = \frac{a}{2}\sqrt {{{\left( {1 + \frac{{2w}}{a}} \right)}^2} - 1} = \frac{a}{2}\sqrt {{{\left( {\frac{b}{a}} \right)}^2} - 1} $
(3) (3) 式表明, 增加电极宽度,可以提高电场的穿透深度。联合(2)式和(3)式可得到电容值与穿透深度的关系表达式为:
$ C = \frac{{2{\varepsilon _{\rm{r}}}{\varepsilon _0}l}}{\pi }\ln \left[ {\frac{2}{a}(T + \sqrt {{T^2} + 1} )} \right] $
(4) 利用平面电容传感器检测液位时,电容的电极粘贴在容器外壁上,容器壁及其外侧的空气、容器内的液体及液体上方的空气都是平面电容的介质,其中容器壁及其外侧的空气对液位测量的影响可忽略,引起电容值变化的主要原因是容器内液体和空气的混合介质介电常数的变化。电容电极的长度l是两种介质高度的总和,设液面高度为h,则空气介质的高度为(l-h),平面电容相当于两个不同介质的电容的并联,电容值是两个并联电容的和,即C=C1+C2。液位变化时,设液面高度升高了Δh,即液面高度为(h+Δh),空气介质的高度为(l-h-Δh),由(4)式可以计算出液位变化前后的电容值,从而得到电容值的变化量为:
$ \Delta C = \frac{{2{g_0}({\varepsilon _{\rm{r}}} - 1)A{h_l}}}{{\rm{ \mathsf{ π} }}}\ln \left[ {\frac{2}{a}(T + \sqrt {{T^2} + 1} )} \right] $
(5) (5) 式表明, 液位变化越大,电容值变化也越大,设平面电容传感器的灵敏度为K,则有:
$ K = \Delta C/\Delta h = \frac{{2{\varepsilon _0}({\varepsilon _{\rm{r}}} - 1)}}{{\rm{ \mathsf{ π} }}} $
(6) (6) 式表明, 传感器的灵敏度与介质的介电常数、电极的间距、电场穿透深度等参量相关,与电极长度无关,又由(3)式可知,电极宽度和电极间距是影响穿透深度的主要参量。综上所述,在电容结构允许的范围内,最小化电极间距,最大化穿透深度(增大电极宽度),能够提高平面电容传感器的灵敏度和信号强度[11]。
-
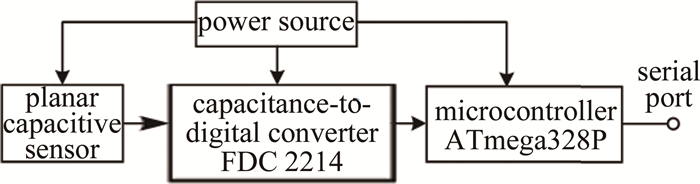
根据平面电容传感器的工作原理,设计了液位检测系统,主要由液位传感器、电容-数字转换电路和单片机电路组成[14],图 3为系统结构框图。
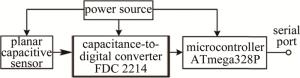
Figure 3. Liquid level detection system structure diagram
-
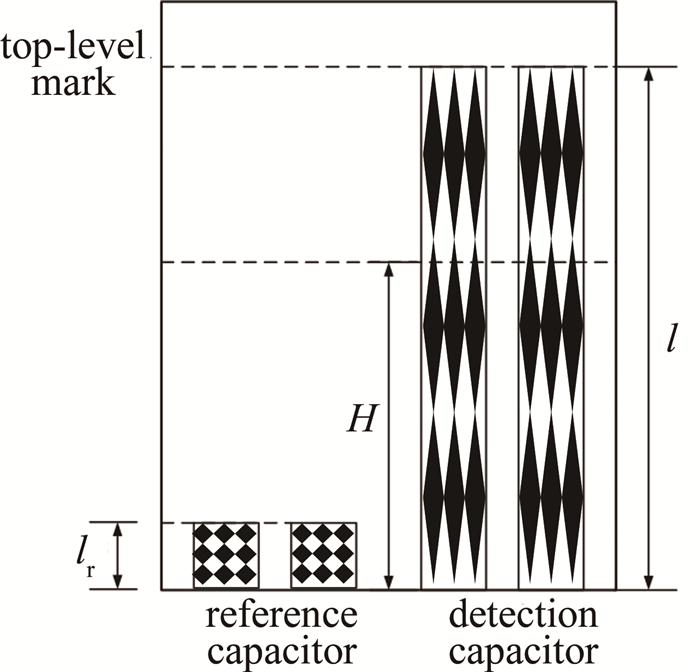
与双筒式液位传感器不同,平面电容传感器采用非接触式测量方式,电容电极直接粘贴在容器外壁上,无需浸入液体中。图 4为传感器安装示意图。容器壁上安装了两个平面电容传感器,分别是液位电容和参考电容,液位电容用于检测实时液位变化,参考电容在液位测量过程中提供液体类型和液体温度变化的参考[15]。图中, H为液位值,lr为参考电容的电极长度。电容的电极由矩形铜箔制成,电极宽度8mm,厚度0.06mm,间距2.5mm,液位电容的电极长度根据容器高度来确定,参考电容的电极长度是固定的(系统中为15mm)。把以上电容的结构参量代入(3)式,可得到两个电容的穿透深度都为$T=\frac{a}{2} \sqrt{\left(1+\frac{2 w}{a}\right)^{2}-1}=$9.17mm,穿透深度能够满足测量要求[12]。
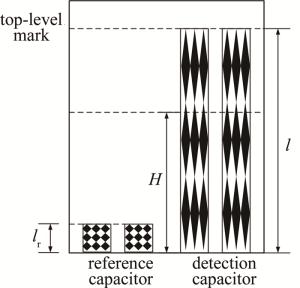
Figure 4. Sensors installation schematic diagram
-
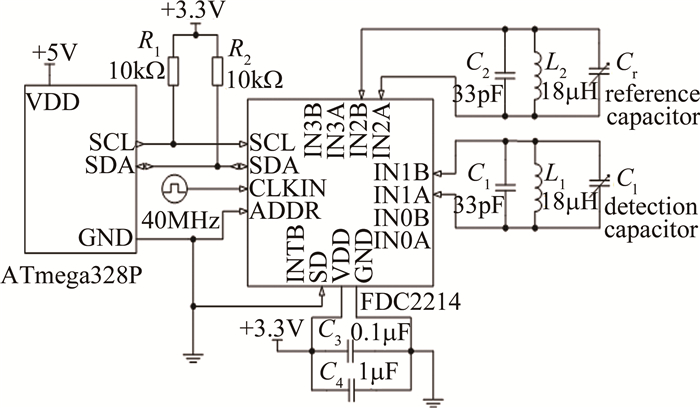
基于FDC2214组成电容-数字转换电路,FDC2214是28位高分辨率、四通道的电容-数字转换芯片,功耗低且可高度抑制噪声和电磁干扰[16]。如图 5所示,在每个通道输入端连接一个电感和电容,由于FDC2214内置振荡电路驱动器,所以可组成LC电感电容振荡电路。平面电容传感器与FDC2214的连接采用了单端输入方式,即液位电容和参考电容分别接入IN1和IN2通道的LC振荡电路中,当液位变化,传感器的电容值随之变化,进而振荡电路的频率也发生变化[17]。
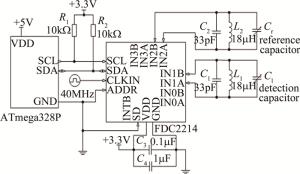
Figure 5. Liquid level detection circuit
FDC2214通过其内部或外部的时钟源产生一个标准参考频率fr,再基于参考频率来测量振荡电路的频率fs,最终把fs转换成数字量D输出。每个活动通道输出的测量数据为[18]:
$ D = \frac{{{2^{28}} \cdot {f_{\rm{s}}}}}{{2{f_{\rm{r}}}}} $
(7) 由于数据D是频率的比值,无量纲。由(7)式可得到该通道上振荡电路的频率为:
$ {f_{\rm{s}}} = \frac{{2{f_{\rm{r}}}D}}{{{2^{28}}}} $
(8) -
ATmega328P单片机是高性能、低功耗的8位微控制器,也是Arduino平台的核心处理器,电路如图 5所示。单片机与FDC2214采用内部集成电路总线通信方式,液位值采用串口直接输出数字量,使用方便。
-
在液位检测系统中使用了液位电容和参考电容两个平面电容传感器,设H为液位值,lr为参考电容的电极长度,Cl为有液体时的液位电容值,Cl, 0为没有液体时的液位电容值,Cr为有液体时的参考电容值,Cr, 0为没有液体时的参考电容值,由(5)式可知传感器的电容值变化与液位变化成比例关系,所以有:
$ H = {l_{\rm{r}}}\frac{{{C_{\rm{l}}} - {C_{{\rm{l}},0}}}}{{{C_{\rm{r}}} - {C_{{\rm{r}},0}}}} $
(9) 式中, Cl对应的液位电容并联在FDC2214的IN1通道输入端,与电感L1、电容C1组成振荡电路,根据LC振荡电路的频率公式, $f=\frac{1}{2 \pi \sqrt{L C}}$,可得到液位电容值为:
$ {C_{\rm{l}}} = \frac{1}{{{{(2{\rm{ \mathsf{ π} }}{f_l})}^2}{L_1}}} - ({C_1} + {C^\prime }) $
(10) 式中, C′为振荡电路中微小的寄生电容。同理,Cr, Cl, 0, Cr, 0都可以表示为(10)式的形式,所以液位值H又表示为:
$ H = {l_{\rm{r}}}\left( {\frac{1}{{{f_{\rm{l}}}^2}} - \frac{1}{{{f_{{\rm{l}},0}}^2}}} \right)/\left( {\frac{1}{{{f_{\rm{r}}}^2}} - \frac{1}{{{f_{{\rm{r}},0}}^2}}} \right) $
(11) 联合(8)式和(11)式,可得到液位值与FDC2214输出的数据的函数关系,其表达式为:
$ H = {l_{\rm{r}}}\left( {\frac{1}{{{D_{\rm{l}}}^2}} - \frac{1}{{{D_{{\rm{l}},0}}^2}}} \right)/\left( {\frac{1}{{{D_{\rm{r}}}^2}} - \frac{1}{{{D_{{\rm{r}},0}}^2}}} \right) $
(12) 式中, Dl, 0, Dr, 0, Dr这3个数据在测量环境和被测液体不变化时基本不变,所以液位值H主要和Dl相关。fl, fl, 0, fr, fr, 0和Dl, Dl, 0, Dr, Dr, 0分别对应有无液体时液位电容和参考电容的频率和输出数据。
-
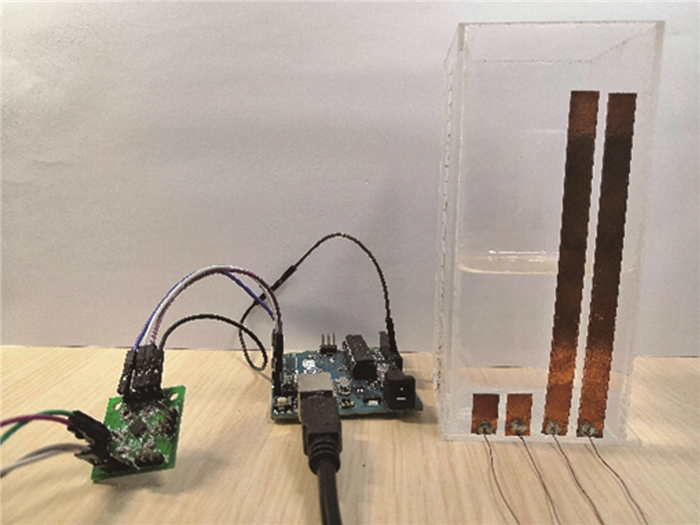
如图 6所示,为了研究平面电容传感器在低液位测量中的工作特性,实验用长方体容器的长宽高为5757130mm,容器壁是绝缘体,壁厚2mm。容器壁上平面电容传感器的电极宽度8mm,厚度0.06mm,间距2.5mm,液位电容的电极长度105mm,参考电容的电极长度15mm。选用3种液体作为测量对象,分别是纯净水、洗洁精溶液(体积分数为0.50洗洁精+体积分数为0.50纯净水)和墨汁,由于容器高度限制,测量实验中液位范围为0mm~115mm,液位每升高5mm采集一次数据,单片机读取IN1和IN2通道的测量数据经串口输出,测量数据无量纲[19]。
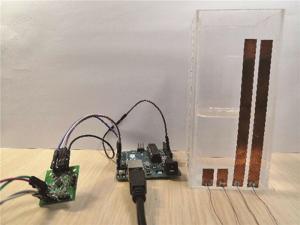
Figure 6. Liquid level detection experiment device
经过对3种液体的10次全量程测试,发现数据稳定,重复性较高,重复性误差约为±0.28%,表 1中列出了对纯净水液位检测时IN1和IN2通道的部分实验数据,还列出了对洗洁精溶液和墨汁液位检测时IN1通道的部分实验数据。由于数值较大(228位),故在软件设计中对数据整体做了处理,表 1中的数据是原数据除以2048后的结果。
Table 1. Liquid level detection experiment partial data
liquid level/mm pure water detergent ink IN1 IN2 IN1 IN1 0 6791 6999 6791 6792 10 6772 6979 6768 6769 20 6753 6971 6744 6746 31 6738 6969 6724 6725 40 6723 6969 6709 6708 50 6709 6968 6693 6693 60 6697 6968 6678 6679 70 6683 6967 6663 6664 80 6670 6967 6649 6650 91 6656 6967 6633 6636 100 6645 6966 6622 6624 105 6640 6966 6617 6618 110 6639 6966 6617 6618 115 6638 6966 6616 6617 根据实验数据生成液位值与FDC2214输出值的特性关系曲线,如图 7所示。3种液体的特性曲线都比较平滑,线性较好,斜率较大,拟合计算得出纯净水、洗洁精溶液和墨汁的灵敏度分别约为(-1.36×2048)/mm, (-1.50×2048)/mm和(-1.53×2048)/mm。在相同的实验条件下,不同的液体检测灵敏度也不相同,验证了(6)式的结论,传感器的灵敏度与介质的介电常数相关。
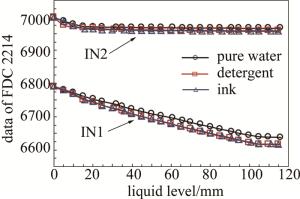
Figure 7. Liquid level detection system output curves
两个通道输出的数据反映出两个传感器电容值的变化,随着液位增加,IN1通道的数据呈线性减小,表明IN1通道对应的液位电容的电容值在逐渐增大,但是当液位值大于105mm(电极长度),IN1通道的数据不再变化,所以在系统设计时要根据被测液位来确定传感器的电极长度,电极长度要高于被测液位。同理,IN2通道的数据变化也与参考电容传感器的电极长度有关,由于参考电极长度是15mm,所以当液位超过15mm后数据变化也非常小。
已知传感器通道输出的数据,结合(12)式可计算出液位值,设(12)式中1$\left(\frac{1}{D_{1}^{2}}-\frac{1}{D_{1, 0}^{2}}\right) /\left(\frac{1}{D_{\mathrm{r}}^{2}}-\frac{1}{D_{\mathrm{r}, 0}^{2}}\right)=$Dl,则有H=lr·Dl,根据Dl计算出液位值H,把计算出的液位值H与实际液位值比对,发现误差较小,最大相对误差为7.8%。分析误差产生的原因,主要有:(1)电路使用的电感和电容元件参量存在误差,导致传感器通道输出数据与理论值有误差;(2)测量装置是手工制作,电极尺寸、液面高度的测量也有误差;(3)传感器的电极未添加屏蔽层,易受杂散信号干扰。减小误差的方法是在软件中修正,对实际液位曲线线性拟合,再利用拟合公式在软件中修正测量结果。
-
研究了平面电容传感器的工作原理,分析了传感器的主要结构参量对其关键性能指标的影响,优化了传感器的结构参量,设计了平面电容传感器液位检测系统,并且对纯净水、洗洁精溶液和墨汁3种液体进行液位测量实验,验证其功能。液位检测系统工作稳定,多次测量结果重复性较高,重复性误差约为±0.28%,在0mm~105mm液位范围内,对3种不同液体,传感器的灵敏度约为(-1.53~-1.36)×2048/mm,修正前的测量数据最大相对误差为7.8%,且数据线性较好,易于修正。平面电容液位传感器结构简单、成本低、灵敏度高,测量时不需要浸入液体,为实现非接触式低液位检测提供了一个有效的解决方案。
平面电容传感器液位检测系统设计
Design of liquid level detection system based on planar capacitive sensor
-
摘要: 为了对高度小于100mm的液位进行非接触式测量,采用液位变化改变平面电容边缘电场参量的方法,对平面电容传感器的工作原理进行了理论分析,研究了平面电容传感器的结构参量对其灵敏度、穿透深度的影响,并对传感器结构参量进行了优化, 基于平面电容传感器, 设计了非接触式低液位检测系统,通过对纯净水、洗洁精溶液和墨汁的实验验证,取得了0mm~100mm范围的液位测量数据。结果表明,该检测系统工作稳定,具有线性输出,重复性误差约为±0.28%,数据修正前的测量误差小于7.8%。这一结果对非接触式较低液位的检测是有帮助的。Abstract: In order to implement non-contact detection for liquid level less than 100mm in height, the method for changing planar capacitive edge electric field parameters by liquid level was adopted. The working principle of planar capacitive sensor was analyzed, and the effect of planar capacitive sensor structure parameters on sensitivity and penetration depth was studied. The method of structural optimization design on sensors was proposed. The non-contact detection system for lower liquid level was designed based on planar capacitive sensors. The measured data of pure water, detergent solution and ink within 100mm was obtained by experimental verification. The experimental results show that the system with linear output is stable. The repeatability error is about ±0.28%, and the measurement error is within 7.8% before data correction. The results are helpful for non-contact detection for lower liquid level.
-
Table 1. Liquid level detection experiment partial data
liquid level/mm pure water detergent ink IN1 IN2 IN1 IN1 0 6791 6999 6791 6792 10 6772 6979 6768 6769 20 6753 6971 6744 6746 31 6738 6969 6724 6725 40 6723 6969 6709 6708 50 6709 6968 6693 6693 60 6697 6968 6678 6679 70 6683 6967 6663 6664 80 6670 6967 6649 6650 91 6656 6967 6633 6636 100 6645 6966 6622 6624 105 6640 6966 6617 6618 110 6639 6966 6617 6618 115 6638 6966 6616 6617  下载: 导出CSV
下载: 导出CSV
-
[1] ZHOU Zh Y, JIANG R, LUO X W, et al. Application analysis of liquid-level monitoring technology to plant protection UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(4): 47-55(in Chinese). [2] HU G, BO H L. Design of two-electrode capacitance sensor for control rod position measurement[J]. Atomic Energy Science and Technology, 2017, 51(12): 2352-2356(in Chinese). [3] ZHANG J, DING L, WEN T D. Flow-electrostatic coupled field simulation and analysis of capacitive level sensor with lubricating oil tank[J]. Transducer and Microsystem Technologies, 2019, 38(3): 50-52(in Chinese). [4] DAI Sh Q, CHEN D X, TIAN W G, et al. Thermal barrier coatings based on planar capacitive sensor defect detection system[J]. China Measurement & Test, 2017, 43(1): 78-83(in Chinese). [5] TEXAS INSTRUMENTS. Common inductive and capacitive sensing applications[EB/OL]. (2020-01-09)[2020-01-20].http://www.ti.com.cn/product/cn/FDC2214/technicaldocuments. [6] WANG Zh J, SHENG W T, XIE J Y, et al. Research of locating measurement of cylindrical objects based on linear laser triangulation[J]. Laser Technology, 2019, 43(4): 464-470(in Chinese). [7] LIH W L, FAKHRA A, ZUBAIR A, et al. Planar capacitive type humidity sensor fabricated using PTB7-Th by facile solution processing approach[J]. Applied Physics, 2019, A125(1):32-37. doi: 10.1007/s00339-018-2297-7 [8] WANG W X. The design and application of fringing electric field sensors[D]. Taiyuan: North University of China, 2018: 11-12(in Chinese). [9] TANG R. Study on capacitive sensing for insulation aging of dielectric materials[D]. Hefei: Hefei University of Technology, 2017: 12-15(in Chinese). [10] DING Y X. Development of nondestructive testing system for adhesive layer structure of thermal insulation material by planar electrical capacitance tomography[D]. Haerbin: Harbin Institute of Technology, 2019: 19-28(in Chinese). [11] ZHAN Zh, HUANG Y Zh, LI K. Parameters optimization design and experiments of planar capacitive sensor[J]. Transducer and Microsystem Technologies, 2017, 36(12): 95-97(in Chinese). [12] THAO N. Capacitive sensing: Water level application[D]. Helsinki: Helsinki Metropolia University of Applied Sciences, 2016: 9-21. [13] DENG Ch X. Study on defect detection and optimization for aeronautical composite materials based on planar ECT[D]. Tianjin: Civil Aviation University of China, 2019: 31-45(in Chinese). [14] QU H Q, WU K P, YE Q. Non-contact hand gesture recognition system based on capacitive sensor[J]. Radio Engineering, 2019, 49(12): 1103-1106(in Chinese). [15] TEXAS INSTRUMENTS. Capacitive sensing: Direct vs remote liquid level sensing performance analysis[EB/OL].(2015-07-24)[2019-11-16]. http://www.ti.com.cn/product/cn/FDC2214/technicaldocuments. [16] TEXAS INSTRUMENTS. Accurate frost or ice detection based on capacitive sensing[EB/OL]. (2018-03-01)[2019-11-16].http://www.ti.com.cn/product/cn/FDC2214/technicaldocuments. [17] TEXAS INSTRUMENTS. FDC2x1x EMI-resistant 28-bit, 12-bit capacitance-to-digital converter for proximity and level sensing applications datasheet (Rev.A)[EB/OL]. (2015-08-30)[2019-11-16]. http://www.ti.com.cn/product/cn/FDC2214/technicaldocuments. [18] GUO X, TAN Y L, SHEN M. Gesture recognition system based on FDC2214[J]. Transducer and Microsystem Technologies, 2018, 37(12): 90-92(in Chinese). [19] CAO Y L, HAN J G, XIONG X M. Study on application of optical fiber displacement sensor in measurement of PET bottle wall thickness[J]. Laser Technology, 2018, 42(6): 817-821(in Chinese). -

 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 6725
- HTML全文浏览量: 4870
- PDF下载量: 20
- 被引次数: 0
