 网站地图
网站地图



-
导航是指个体运用各种方法确定自身位置,并实现从起点沿着预定轨迹到达目的地的过程。目前比较常用的导航系统有卫星导航、无线电导航、惯性导航和天文导航。其中卫星导航和无线电导航容易受到人为干扰,惯性导航随着工作时间的增加会增大累计误差,天文导航[1-6]不适合低空陆地使用。因此,近年来凭借着大气偏振分布模式丰富的空间及方向信息和难以受到人为干扰的特点,天空光偏振导航成为目前的研究热点。这种导航模仿昆虫对光偏振特性的感知,通过对天空中大气偏振模式的实时探测进行导航。因此,充分研究大气偏振特性,掌握大气偏振分布信息,才能通过其特征计算出自身相对于太阳的位置,实现导航。
国内外不同学者对不同区域、时间以及天气条件下的大气偏振分布模式进行了探测和研究。1981年, BRINES等人[7]设计了一款每隔5°进行一次数据采集的点源式天空偏振光检测系统。此后,WEHNER等人[8]在该系统的基础上研发了一种基于光电二极管的天空偏振检测仪,能用摄像头实时监测天气状况。2000年, LAMBRINOS等人[9]研发的点源式的天空偏振光测量装置,通过模拟昆虫复眼中感杆神经的排列结构,设计了由6个偏振敏感单元构成的偏振光感知通道来采集光的偏振信息。2002年, HORVÁTH等人[10]研制了一款能探测全天空偏振态的图像式偏振信息测量装置。该系统由3个CCD相机并排组成,并且在每个相机上加装鱼眼镜头,每个相机中的线偏振片的主光轴与参考方向的夹角分别为0°, 60°和120°。国外诸多学者以这款设备为基础进行改进,比如加小圆盘来避免鱼眼镜头在阳光下产生耀斑[11],增加线偏振度方向的个数[12]等。至于国内,在2002年, 中国科学院安徽光学精密机械研究所研发了一套多波段偏振CCD相机的机载测试仪,需要结合飞行器Y-12进行试验[13]。CHU等人[14]研发了一套基于偏振光的组合导航系统,包含天空偏振光检测传感器、移动机器人、光电码盘、电脑等。TIAN等人[15]利用数字CCD相机、短焦镜头、二向色型偏振片、3维旋转支架罗盘和水平仪等搭建的可用于检测全天空的偏振成像系统。CUI等人[16]设计了成像式天空散射光偏振特性测量系统。该系统是由鱼眼镜头、偏振片、连接环、CCD相机、云台、三脚架、计算机、电源、控制器和电动伺服部分组成。2013年, ZHAO等人[17]研发了一种利用电动转台来完成探测的利用连续旋转检偏器的偏振成像检测仪。
目前,国内外对天空偏振光导航定位开展了一系列研究,也取得了一系列的成果,但整体上仍处于理论研究和样机实验测试阶段。在此基础上,本文中提出了一种利用手机和线性偏振片相结合的便携式天空偏振测量的方法。该方法摒除了让获取的图像边缘区域扭曲,影响实际数据的鱼眼镜头,提高了设备准确性,实现了易操作、易携带的目标。通过对0°, 45°, 90°, 135°方向的线偏振图像的获取,实现了对大气偏振分布情况的测量。实验结果表明,本文中采用的方法能够实现对天空光偏振分布模式的探测,并且具有易操作、易携带等优点。
-
天空光偏振导航模仿昆虫对光偏振特性的感知,通过对天空中偏振模式的实时探测,确定自身相对于太阳的位置以实现导航。在太阳光经过大气传输的过程中,天空中由单次散射或瑞利散射引起的正偏振和由多次散射引起的负偏振,以及少量的从地面引起的光的散射,形成了相对稳定的空间分布规律, 即大气偏振分布模式。这种大气偏振模式并非静态的,而是一种动态的模式,它会随着大气中粒子和气候条件等多种因素影响而动态改变[18]。其中,分布特征最明显的区域围绕着正负偏振在天空中抵消的点,即中性点。因此中性点区域是描述大气偏振模式的重要分布特征之一[19]。目前已发现在大气偏振模式中存在4个中性点,即在反日点上方的Arago点;位于太阳上方的Babinet点;在太阳下方的Brewster点;位于反日点下方的第四中性点[20]。由于中性点始终处于太阳子午面上,所以连接两个中性点就可以得到导航参考线,从而根据太阳子午面的位置实现导航。Rayleigh散射模型是基于Rayleigh散射原理的经典大气偏振分布模式表征方法,它能够通过偏振度和偏振角准确表征理想大气环境下天空光偏振模式的空间分布特征。通常采用地平坐标系作为导航坐标系进行描述,其中用方位角和高度角表示点的位置。方位角指该点与观察者所组成的平面与正北方向的夹角。高度角是该点和观察者的连线与地平面的夹角。天顶角是该点和观察者的连线与天顶方向的夹角。
如图 1所示,以观察者位置为原点,以其头顶方向为天顶方向, 即z轴方向,正北方向为y轴方向,正东方向为x轴方向,建立导航坐标系。其中,(π/2-θT, φT)为太阳位置,OG是观察者观测方向,(π/2-θG, φG)是球面上任意一点。φT是太阳方位角;θT是太阳天顶角;π/2-θT是太阳高度角;φG是观察点方位角;θG是观察点天顶角;π/2-θG是观察点高度角;红色平面是太阳子午线(sun meridian,SM)与反太阳子午线(anti-sun meridian,ASM)构成的太阳子午面,根据其位置可实现导航。
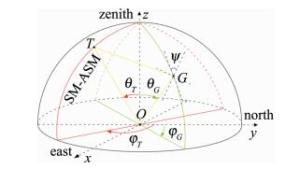
Figure 1. Atmospheric polarization pattern navigation coordinate system
根据Rayleigh散射理论,天空中任意点(π/2-θG, φG)处的偏振度P为[21]:
$ P = {P_{{\rm{max}}}}\frac{{{\rm{si}}{{\rm{n}}^2}\gamma }}{{1 + {\rm{co}}{{\rm{s}}^2}\gamma }} $
(1) 式中,Pmax表示最大偏振度,理论值为1,晴朗天空时约为0.7。当入射光散射角为γ时,在球面三角形zGT中,由球面三角形的余弦定理可知:
$ {\rm{cos}}\gamma = {\rm{sin}}{\theta _T}{\rm{sin}}{\theta _G} + {\rm{cos}}({\varphi _G} - {\varphi _T}){\rm{cos}}{\theta _T}{\rm{cos}}{\theta _G} $
(2) 偏振角ψ是G点的E矢量振动方向与弧zG的夹角。其中G点的E矢量振动方向垂直于GT。依据Rayleigh散射相关理论,G点的E矢量振动方向垂直于平面TOG。则该点处偏振角为[21]:
$ {\rm{tan}}\psi = \frac{{sin\pi \left( {\frac{{\rm{ \mathsf{ π} }}}{2} - {\theta _G}} \right){\rm{cos}}\left( {\frac{{\rm{ \mathsf{ π} }}}{2} - {\theta _T}} \right) - {\rm{cos}}({\varphi _G} - {\varphi _T}){\rm{cos}}\left( {\frac{{\rm{ \mathsf{ π} }}}{2} - {\theta _G}} \right){\rm{sin}}\left( {\frac{{\rm{ \mathsf{ π} }}}{2} - {\theta _T}} \right)}}{{{\rm{sin}}({\varphi _G} - {\varphi _T}){\rm{sin}}\left( {\frac{{\rm{ \mathsf{ π} }}}{2} - {\theta _T}} \right)}} $
(3) 大气偏振分布模式主要由偏振度和偏振角来描述。
-
通过斯托克斯矢量法可以完备的描述任意光束的偏振状态,其矢量S=[I, Q, U, V]T可以由手机相机直接测量。所以在实际测量中,用斯托克斯矢量求解。其中, I表示光束S的总光强;Q表示线偏振光在水平方向和垂直方向上的光强差;U表示线偏振光在45°方向和135°方向上的光强差;V为圆偏振分量,一般情况下自然光的圆偏振分量很少,故忽略不计,即V=0。则可以将光表示成[22]:
$ \mathit{\boldsymbol{S}} = \left[ \begin{array}{l} \mathit{\boldsymbol{I}}\\ \mathit{\boldsymbol{Q}}\\ \mathit{\boldsymbol{U}} \end{array} \right] = \left[ \begin{array}{l} \mathit{\boldsymbol{I}}\left( {0^\circ } \right) + \mathit{\boldsymbol{I}}\left( {90^\circ } \right)\\ \mathit{\boldsymbol{I}}\left( {0^\circ } \right) - \mathit{\boldsymbol{I}}\left( {90^\circ } \right)\\ \mathit{\boldsymbol{I}}\left( {45^\circ } \right) - \mathit{\boldsymbol{I}}(135^\circ ) \end{array} \right] $
(4) 式中, I(0°), I(90°), I(45°), I(135°)分别表示0°, 45°, 90°, 135°方向的线偏振图像,即线性偏振片主透光轴与参考轴夹角为0°, 45°, 90°, 135°时的光强测试结果。
表征偏振特性的主要参量有偏振度P和偏振角ψ:
$ P = \frac{{\sqrt {{\mathit{\boldsymbol{Q}}^2} + {\mathit{\boldsymbol{U}}^2}} }}{\mathit{\boldsymbol{I}}}, (0 \le P \le 1) $
(5) $ \psi = \frac{1}{2}{\rm{arctan}}\left( {\frac{\mathit{\boldsymbol{U}}}{\mathit{\boldsymbol{Q}}}} \right), ( - 90^\circ \le \psi \le 90^\circ ) $
(6) 根据(5)式和(6)式计算可以得到测量时大气偏振分布的偏振度P和偏振角ψ。其中,称偏振度为零并且周围偏振角大致呈现中心对称分布的点的集合,为中性点。
根据高斯公式:f′/l′+f/l=1以及光学系统的垂轴放大率β=l′/l=y′/y,其中f′是像方焦距,f是物方焦距,l′是像距,l是物距,y是物体高度,则可以求出像高y′,进而求出探测器中的像元大小da和dc。再依据图像中中性点区域的位置求出中性点的高度角修正值θ和方位角修正值φ:
$ {\rm{tan}}\theta = \frac{{\sqrt {{d_c}^2{{\left( {i - {i_0}} \right)}^2} + {d_a}^2{{\left( {j - {j_0}} \right)}^2}} }}{f} $
(7) $ {\rm{tan}}\varphi = \frac{{{d_a}\left( {j - {j_0}} \right)}}{{{d_c}(i - {i_0})}} $
(8) 式中, 假设中性点区域位置坐标为(i, j),图像中心坐标为(i0, j0),仪器焦距为f。根据修正值对镜头数据进行修正,得到中性点区域位置。
-
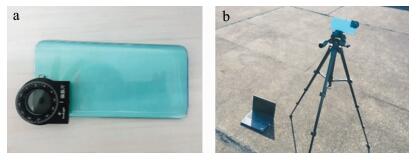
为实现大气偏振分布模式的探测,本文中所用设备包括三脚架、手机华为荣耀9(具体参量见表 1)手机以及可旋转的线性偏振片,最后用MATLAB软件对图像进行数据处理。如图 2所示,图 2a是设备整体结构。其中偏振片位于手机镜头前端固定。手机相机作为探测器,感应和记录光强的信息。前置的偏振片具有不同角度的偏振光对应不同透过率的特点,可以实现对偏振态的测量。
Table 1. Mobile phone specific parameters
parameter index model STF-AL00 sensor cmos imx286 aperture f/2.2 focal length 27mm field coverage 60° 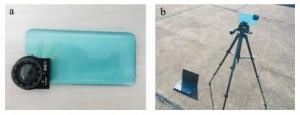
Figure 2. Sky light polarization pattern detection equipment
-
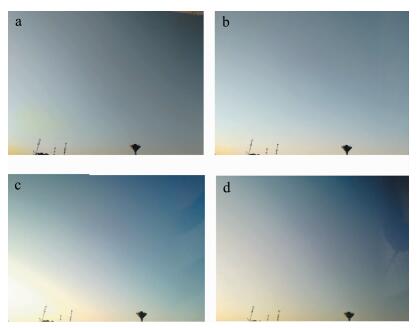
本次测量中选取了桂林市桂林电子科技大学实验楼为观测地点来进行试验观测,具体观测数据见表 2。相较于常用的天空光偏振测量仪器,为了便于携带和操作,所用的测量方法并不包含固定装置,如图 2a所示。利用该装置测量大气偏振分布情况得到4幅偏振图像, 如图 3所示。其中图 3a~图 3d分别表示线偏振度方向为0°, 45°, 90°, 135°的图像。
Table 2. Observation information
time 2018-11-08T17:30 latitude and longitude 110°19′59″E,25°17′10″N elevation 175m solar elevation angle 1°20′04″ solar azimuth angle 75°34′14″ 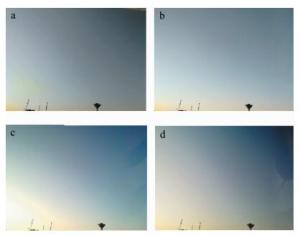
Figure 3. Atmospheric polarization image
-
在图 3所示的不同线偏振度图像,同一物体的同一位置上各选取一点,得到一组匹配点。将这样选取的10组匹配点通过MATLAB软件进行图像配准。再将配准后的不同线偏振度图像转换为灰度图像,通过(4)式~(6)式进行斯托克斯矢量求解并计算,获得偏振度图像和偏振角图像。将所得的灰度图像进行伪彩色处理,可以更直观的观察。如图 4所示,可看出大气偏振具体分布情况。黑色点为中性点。其中根据(1)式~(3)式可知, 偏振角与偏振度的取值范围,但是ψ∈(-90°,-45°)∪(45°, 90°)时变化幅度较小,则在图像中偏振角取值范围为[-45°, 45°],如图 4d所示[23-24]。
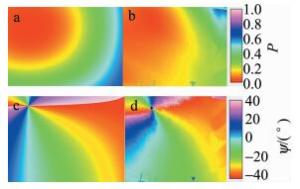
Figure 4. a—theoretical image of sky light polarization b—actual image of sky light polarization c—theoretical image of sky light polarization angle d—actual image of sky light polarization angle
以表 2中的观测信息为基础,通过MATLAB软件依据(1)式~(3)式进行仿真处理,得到如图 4a所示天空光偏振度理论图像和图 4c所示天空光偏振角理论图像。调整了染色区域及大小,以匹配实际偏振图像。如图 4所示,偏振度在中性点时为零,且以中性点为中心呈环状分布,沿着太阳子午线方向,随着相对位置角距离增加而逐渐增大。偏振角以中性点为中心大致呈现中心对称分布。理论分布规律与实际偏振图像一致,符合大气偏振分布理论。此外由于装置中不包含固定部分,可以看出,偏振图像中存在镜片反光等问题,但是这些对中性点区域的测量影响不大。
如图 4所示,处理后的偏振图像都是围绕着中性点展开的。其中性点是位于太阳上方的Babinet点。仿真得到的理论中性点位置为(88.6°, 255.6°)。通过表 2所示的观测点信息得到镜头方向观测点位置为(63°, 302°)。根据实际偏振图像中的中性点位置,通过(7)式~(8)式得到天空中中性点位置修正值,从而得到实际探测中中性点区域位置范围。如表 3所示, 其测量值与仿真值间的偏差在不确定度范围内,本方案的测量方法符合理论仿真值,证明了本文中提出的方法可行,可以实现导航定位。
Table 3. Neutral point position information
altitude angle azimuth angle camera orientation 63.0° 302.0° correction value 23.3°±2.6° 47.8°±0.8° measured data 86.2°±2.6° 254.2°±0.8° simulation value 88.6° 255.6° deviation 2.4°±2.6° 1.4°±0.8° 相较偏振度图像,处理后的伪彩色偏振角图像中偏振角颜色变化明显。中性点在偏振角图像中是各角度方向的交点,可根据各个角度的交线找到并跟踪其变化。并且由于大气分子和气溶胶微粒等对太阳光具有吸收作用,天空中的云层使太阳光发生多次散射,削弱了偏振度,但是偏振角的分布相对稳定。所以偏振角图像更易于确定导航参考线位置,实现导航。
-
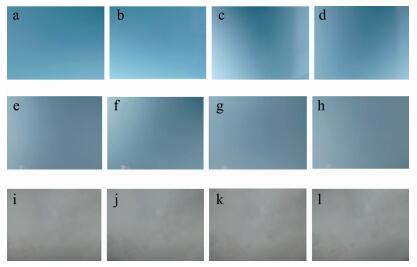
考虑到大气偏振是由大气层中的空气分子和气溶胶微粒对太阳光的散射形成的。所以针对云层的分布情况设置了不同的天气对偏振图像影响的3组实验。选取了如表 4所示的观测信息和以桂林电子科技大学为观测地点来说明实际测试结果。为得到准确的图像, 选择如图 2b所示设备,获得了如图 5所示的不同天气条件下的偏振数据。重复上面的数据处理过程,实际探测的偏振分布情况如图 6所示,其中黑色点为中性点,黑色线是导航参考线的大致位置。
Table 4. Test time and weather conditions
number time weather 1 2018-11-08T17:05 sunny 2 2019-05-10T16:22 partly cloudy 3 2019-05-03T11:08 cloudy 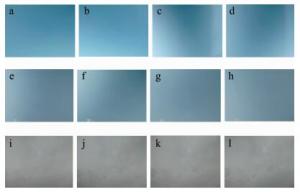
Figure 5. Polarized images under different weather conditions
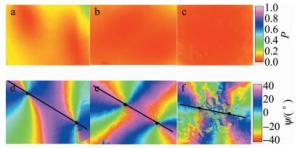
Figure 6. Polarization distribution under different weather conditions
如图 6所示,晴朗和少云天气下于下午17:00左右探测到中性点:Babinet点和Arago点。多云天气下在中午11:08探测到中性点:Babinet点和Brewster点。此外偏振度在中性点处为零,以中性点为中心呈环状扩散。偏振角以中性点为中心呈现大致中心对称现象。符合大气偏振分布理论。相较于偏振度,云层对大气偏振分布模式中偏振角的影响并不大。在有限的视场范围内,晴朗时偏振度最大值为0.46,少云时,偏振度最大值为0.32,多云时,偏振度最大值为0.28。多云时中性点区域面积大约是晴朗时该区域的9倍,少云时该区域的5倍。因此随着天空中云的数量增大,偏振度图像的测量幅度逐渐变小,偏振角图像中中性点区域面积逐渐增加,各个角度的交线越来越模糊。但是仍可见中性点区域(黑色点)和导航参考线(黑色线)大致位置,依旧可以实现定位。
因为云层对太阳光的散射作用,所以设置了不同天气(晴朗、少云、多云)对偏振图像影响的实验。得出结论:采用本文中所提供的方法进行大气偏振分布情况探测时,最好选取晴朗天空的中性点区域为探测对象。天空中云层的增加,会降低探测及导航的准确性。
-
利用手机摄像头和线性偏振片相结合的方法,完成了不同线偏振度的偏振图像的测量,得到了大气偏振度图像和偏振角图像,并根据偏振角图像绘制得到了导航参考线。进行了基于Rayleigh散射原理的理论仿真,得到了理论中性点位置, 并通过实际探测图像计算出了中性点区域位置的信息, 验证了测量值符合理论仿真值,证明了本文中所提出方法得可行性。在实际测量的过程中,云层的增加一定程度上会使天空偏振角的分布发生扭曲,但即使在多云天气太阳被遮蔽的情况下,依然可以通过两个中性点的连线提供导航参考。此外本方法有效地避免了常用的天空光偏振模式测量仪器中鱼眼镜头所引起的图像边缘区域扭曲以及仪器体积大、便携性差、操作繁琐等问题,为天空光偏振导航的实时定位打下了基础。但是数据仍受天气条件影响较大,并存在镜片反光等问题,后续的研究将针对这些不足一一改进,提高中性点位置计算的精度。
大气偏振中性点的便携式测量
Portable measurement of neutral points in atmospheric polarization pattern
-
摘要: 为了避免常用的天空光偏振模式测量仪器中鱼眼镜头所引起的图像边缘区域扭曲的缺点,采用手机相机和线性偏振片相结合的方法,进行了理论分析和实际验证,得到了大气偏振模式的分布情况和中性点位置的数据。结果表明,实际测量的中性点区域与理论仿真的结果间高度角的偏差为2.4°±2.6°, 方位角的偏差为1.4°±0.8°,证明了测量方法的可行性;随着天空中云层的增加,天空光偏振分布图像会发生扭曲,但仍然可以确定中性点位置,为天空光偏振仿生导航提供了参考。该研究可用来确定太阳位置、实现自身定向及导航定位,并且具有易操作、便携等优点,在一定程度上降低了天空光偏振仿生导航的成本,提高了民用价值。
-
关键词:
- 散射 /
- 中性点 /
- Rayleigh散射 /
- 大气偏振模式
Abstract: In order to avoid the distort of the edge area of the image from the acquired data through a fisheye lens, a simple method of combining a mobile phone camera and a linear polarizer was adopted in this study. The method was used for theoretical analysis and practical verification, and data on the distribution of the atmospheric polarization pattern and the position of the neutral points were obtained. The results show that the deviation of the altitude angle between the actual measured the area of the neutral point and the result of theoretical simulation is 2.4°±2.6°; the deviation of the azimuth angle is 1.4°±0.8°, which proves the feasibility of the measurement method. As the increasing of the clouds in the sky, the image of the polarization pattern distribution of sky light will be distorted, especially the polarization angle image. However, it is still possible to determine the position of the neutral points, thereby determining the navigation reference line, and providing a reference for polarized bionic navigation of sky light. The research can also be used to determine the position of the sun, achieve self-orientation, and navigation positioning. The method used in this research has the advantages of easy operation and portability. This method reduces the cost of sky light polarized bionic navigation to a certain extent, and improves the civilian value.-
Key words:
- scattering /
- neutral points /
- Rayleigh scattering /
- skylight polarization pattern
-
a—0° linearly polarized image b—45° linearly polarized image c—90° linearly polarized image d—135° linearly polarized image
Figure 3. Atmospheric polarization image
Figure 4. a—theoretical image of sky light polarization b—actual image of sky light polarization c—theoretical image of sky light polarization angle d—actual image of sky light polarization angle
Figure 5. Polarized images under different weather conditions
a—0° linearly polarized image in fine weather b—45° linearly polarized image in fine weather c—90° linearly polarized image in fine weather d— 135° linearly polarized image in fine weather e—0° linearly polarized image in low cloud weather f—45° linearly polarized image in low cloud weather g—90° linearly polarized image in low cloud weather h—135° linearly polarized image in low cloud weather i—0° linearly polarized image in cloudy weather j—45° linearly polarized image in cloudy weather k—90° linearly polarized image in cloudy weather l—135° linearly polarized image in cloudy weather
Figure 6. Polarization distribution under different weather conditions
a—polarization degree image in sunny weather b—polarization degree image in less cloudy weather c—polarization degree image in cloudy weather d—polarization angle image in sunny weather e—polarization angle image in less cloudy weather f—polarization angle image in cloudy weather
Table 1. Mobile phone specific parameters
parameter index model STF-AL00 sensor cmos imx286 aperture f/2.2 focal length 27mm field coverage 60°  下载: 导出CSV
下载: 导出CSV
Table 2. Observation information
time 2018-11-08T17:30 latitude and longitude 110°19′59″E,25°17′10″N elevation 175m solar elevation angle 1°20′04″ solar azimuth angle 75°34′14″
下载: 导出CSV
Table 3. Neutral point position information
altitude angle azimuth angle camera orientation 63.0° 302.0° correction value 23.3°±2.6° 47.8°±0.8° measured data 86.2°±2.6° 254.2°±0.8° simulation value 88.6° 255.6° deviation 2.4°±2.6° 1.4°±0.8°
下载: 导出CSV
Table 4. Test time and weather conditions
number time weather 1 2018-11-08T17:05 sunny 2 2019-05-10T16:22 partly cloudy 3 2019-05-03T11:08 cloudy
下载: 导出CSV
-
[1] WU H Z, NAN Y, FU Y Zh. Summary of satellite navigation techno-logy development at home and abroad[J]. Modern Defence Technology, 2008, 36(5): 46-51(in Chinese). [2] JIANG X D, YU J Y, ZHU L K. Research of combined navigation technology based on position sensitive detectors[J]. Laser Technology, 2019, 43(3): 335-340(in Chinese). [3] ZHANG X L, LUO Y Sh, LIN Y Ch. Research of robot navigation vision sensors based on grating projection stereo vision[J]. Laser Technology, 2017, 41(3): 376-379(in Chinese). [4] ZHAO L, ZHOU B. Cognitive ratio technology based design of navigation & positioning systems[J]. Modern Navigation, 2015, 6(4): 322-324(in Chinese). [5] WANG S Y, HAN S L, REN X Y. MEMS inertial navigation techno-logy and its application and prospect[J]. Control and Information Technology, 2018(6): 21-26(in Chinese). [6] WANG A G. Celestial navigation technique in the background of navigation war-the history, present situation and developing tendency of celestial navigation technique[J]. Progress in Astronomy, 2001, 19(2): 326-330(in Chinese). [7] BRINES M L, GOULD J L. Skylight polarization patterns and animal orientation[J].Journal of Experimental Biology, 1982, 96(1):69-91. [8] LABHART T, WEHNER R. How polarization-sensitive interneuron-ones of crickets see thepolarization pattern ofthe sky: A field study with an optoelectronic model neuron[J]. The Journal of Experimental Biology, 1999, 47(6): 757-770. [9] LAMBRINOS D, MOLLER R, LABHART T, et al. A mobile robot employing insect strategies for navigation[J]. Robotics and Autonomous System, 2000, 30(1): 39-64. [10] GÁL J, HORVÁTH G, MEYER-ROCHOW V B, et al. Polarization patterns of the summer sky and its neutral points measured by full-sky imaging polarimetry in Finnish Lapland north of the Arctic Circle[J]. Proceedings of the Royal Society of London, 2001, A457(2010):1385-1399. [11] BERRY M V, DENNIS M R, LEE R L, Jr. Polarization singularities in the clear sky [J]. New Journal of Physics, 2004, 6(162):1-14. [12] BOWLES J H. Airborne system for multispectral, multiangle polarimetric imaging[J]. Applied Optics, 2015, 54(31):F256-F267. doi: 10.1364/AO.54.00F256 [13] SUN X, HONG J, QIAO Y, et al. Analysis of characteristic of multiband aerial polarization image[C]//Optical Technologies for Atmospheric, Ocean, and Environmental Studies. Beijing, China: International Society for Optics and Photonics, 2005: 219-227. [14] CHU J K, ZHAO K Ch, WANG T Ch. Construction and calibration for bionic navigation sensor[J].Micronanoelectronic Technology, 2007, 44(7): 376-378(in Chinese). [15] TIAN L, GAO J, FAN Zh G. The method of the navigation direction angle calculation with the distribution of the atmospheric polarization pattern[J]. Acta Electronica Sinica, 2012, 40(1): 141-146(in Chinese). [16] CUI Y, CAO N N, CHU J K. Design of skylight polarization mea-surement system[J]. Optics and Precision Engineering, 2009, 17(6): 14-31(in Chinese). [17] ZHAO K Ch, LU H, YOU Zh. Automatic detective system for skylight polarized pattern[J].Optics and Precision Engineering, 2013, 21(2): 239-245(in Chinese). doi: 10.3788/OPE.20132102.0239 [18] GUAN G X, YAN L, CHEN J B, et al. Analyzing dynamic property of skylight polarization pattern graph[J]. Computer Applications and Software, 2009, 26(12): 179-181(in Chinese). [19] SADJADI F A. Automated exploitation of sky polarization imagery[J].Applied Optics, 2018, 57 (8):1929-1933. doi: 10.1364/AO.57.001929 [20] POMOZI I, HORVATH G, WEHNER R. How the clear-sky angle of polarization pattern continues underneath clouds: Full-sky mea-surements and implications for animal orientation[J].The Journal of Experimental Biology, 2001, 204(Pt17):2933-2942. [21] CUI Y, XIE N, ZHANG X G, et al. Sky light polarization and meridian in east China sea[J]. Laser & Optoelectronics Progress, 2018, 55(10):102901(in Chinese). [22] CUI Y H. Research on the measurement of the skylight polarization pattern and its assisted directional technology [D]. Harbin: Harbin Institute of Technology, 2012: 30-33(in Chinese). [23] WANG J J, YANG J, ZHANG W T, et al. Analysis and restoration research of fog polarization imaging[J]. Laser Technology, 2016, 40(4): 521-525(in Chinese). [24] ZHAO R, GU G H, YANG W. Visible light image enhancement based on polarization imaging[J]. Laser Technology, 2016, 40(2): 227-231(in Chinese). -

 点击查看大图
点击查看大图

计量
- 文章访问数: 5895
- HTML全文浏览量: 4104
- PDF下载量: 14
- 被引次数: 0
