 网站地图
网站地图






-
无人机(unmanned aerial vehicles, UAV)激光无线能量传输技术以高能量激光束作为能量载体,经准直光学系统发射,在远端利用激光电池阵列将光能转化成电能,实现对无人机的非接触供电,为其提供一种新型能源供应方式。过程中要求跟踪精度达到厘米级,这对捕获、瞄准、跟踪(acquisition, pointing and tracking,APT)系统提出了很高的光束控制精度要求,APT系统的跟踪精度与可靠性直接影响了整个系统的成败[1-4]。
2015年,日产汽车研发中心的HIROTA等人采用垂直腔表面发射半导体激光器,波长975nm,激光功率0.5W~3W可调,以单晶硅光电池片为接收端,激光传输距离为10cm,获得光电转换效率为28%~32%。2016年,俄罗斯“能源”火箭航天集团公司,采用新型光电接收装置,对远距离处的手机(尺寸10cm)充电1h,充了1%,光电转换效率高达60%,作用距离1.5km[5-7]。2014年,山东航天电子技术研究所研发团队进行了两飞艇之间的激光无线能量传输试验,激光工作波长810nm。2017年,武汉大学电子信息学院进行了200m范围内的无人机激光无线传输实验,系统整体转换效率约为12%,跟踪精度优于500μrad[1, 8]。
本文中详细讲述了无人机激光能量传输中APT分系统的工作原理、关键性部分的设计方法以及系统整体电光传输效率的计算过程,并通过原理样机验证了该系统方案的可行性。
-
APT系统一般采用光、机、电复合控制系统结构,从结构和实现功能来看,太阳能无人机激光无线能量传输APT系统工作原理框图如图 1所示[9-10]。
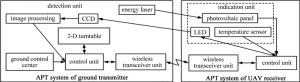
Figure 1. System working principle diagram
无人机与地面控制端通过Zigbee通信模块进行通信,地面控制端接收自身与无人机全球定位系统(global positioning system,GPS)定位信息,通过空间坐标变换与位置推算得到控制量,控制2维转台跟踪无人机,通过系统误差标定与视场范围调整,使CCD视场捕获无人机,当视场稳定后,切换到图像跟踪模式,通过识别无人机信标光进行目标跟踪,开启激光器,激光光束照射到光电池板后将激光转换为电能,稳压后传输给无人机母线,进行激光功率传输。
在目标跟踪过程中,要使激光光束覆盖光电池转换板需要可靠、高精度的图像处理能力,并有效预判无人机轨迹位置[11-12]。APT系统工作过程见图 2。

Figure 2. APT system working process
-
APT系统主要围绕地面控制中心设计,根据不同工作阶段,将整个系统控制过程分为两个部分:GPS指向模块、图像精跟踪模块两个部分。GPS指向模块主要应用空间坐标变换知识,该部分理论较为成熟,不做过多叙述。
-
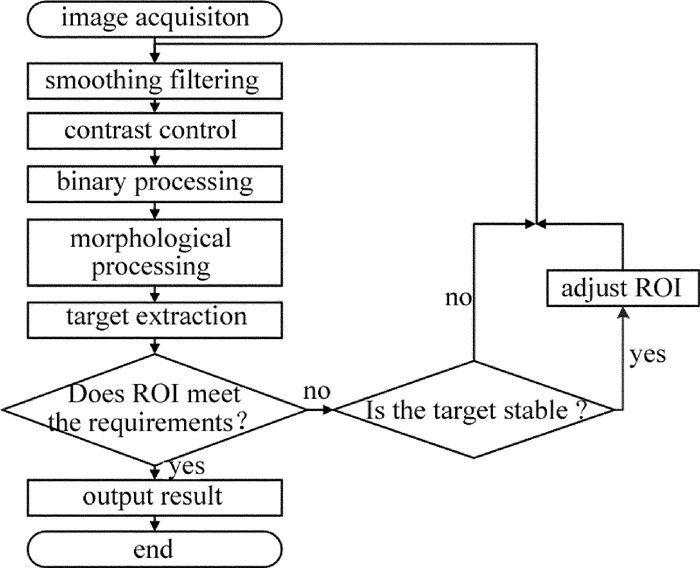
当信标光出现在CCD视场中后,通过图像处理得到信标光在视场中位置。再根据信标光的位置计算得到控制量驱动转台俯仰轴与方位轴,使其在视场的“中心”,这里要考虑信标光与电池板的距离差值,设计时要补偿这段距离,对系统进行标定。整个目标识别的流程图如图 3所示。
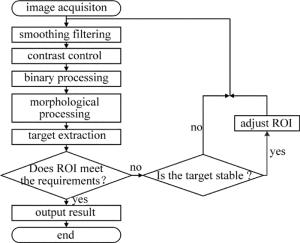
Figure 3. Image processing flow chart
图像采集时难免有噪声的干扰,通过平滑滤波能减弱高频分量,但不影响低频分量,可用来去除图像中的孤立噪点,提高图像质量。平滑滤波器分为线性滤波和非线性滤波。非线性滤波器主要有基于集合、基于形状和基于排序3种,本文中主要讨论中值滤波器。这是常见的基于排序的非线性平滑滤波器,依靠模板来实现,f(s, t)为像素值,N(x, y)为某邻域,中值滤波器的输出为[13-14]:
$ {g_\rm{m}}(x, y) = \mathop {\;{\rm{median}}}\limits_{(s, t) \in N\left( {x, y} \right)} \;[f(s, t)] $
(1) 中值滤波让孤立噪点与邻域内其它像素的灰度值相接近,但又并非简单取均值,所以产生的模糊较少,既可消除噪声又能保持细节。
由于灰度图像无色彩信息,只有256级灰度,所以在光线过暗或过亮时,图像对比度较差,无法区分背景与目标。最基本的解决办法就是对比度调节,通过有选择增大动态区间以提高反差。为了简化算法,这里采用比较简单的3段线性拉伸,由于目标区域是光斑,对于较暗的背景不感兴趣,所以只需要进行亮部区域的拉伸即可,放大目标区间的特征。f(x, y)表示图像中(x, y)位置的像素值,ih与oh分别为给定的像素值,设变换式为:
$ \begin{array}{l} g\left( {x\prime , y\prime } \right) = [f\left( {x, y} \right) - {i_{\rm{h}}}]\frac{{255 - {o_{\rm{h}}}}}{{255 - {i_{\rm{h}}}}} + {o_{\rm{h}}}, \\ \;\;\;\;\;\;\;\;\;\;\;\;\;({i_{\rm{h}}} < f(x, y) < 255) \end{array} $
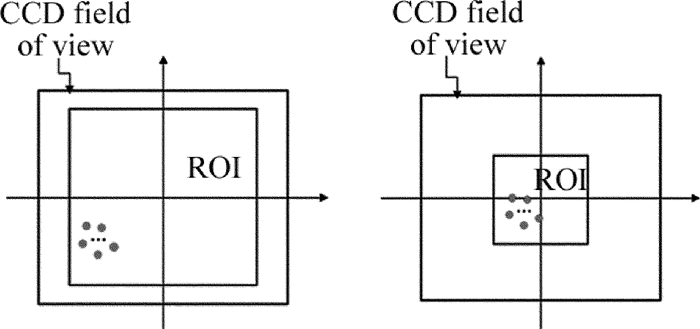
(2) 图像处理范围的减小对于减少计算时间的效果是很可观的,为此,在CCD检测到信标光后,根据情况,不断减少感兴趣区域(region of interest, ROI),减少图像计算范围。当连续n帧图像都位于某一区域时,取这一区域最外围坐标,乘以系数作为感兴趣区域的范围。随着目标慢慢拉近视场中心,ROI区域随之变小,最小值为跟踪方差的3倍,认为此时已经稳定,示意图如图 4所示。
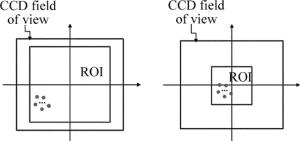
Figure 4. Adaptive ROI adjustment
当目标静止时,模拟无人机飞行过程中背景光强弱变化,用日光灯源随机照射光电池板,得到图像处理后的信标光坐标分布如图 5所示。从图中可以看出,当目标背景光强弱变化过程中,目标识别精度可以达到0.2pixel,并且计算速率可以达到70frames/s,满足应用需求。
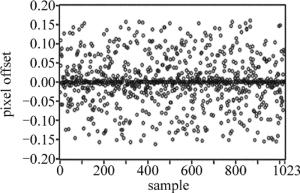
Figure 5. Target coordinate fluctuation diagram
-
实现精准的目标跟踪需要做到两个方面:一方面是APT系统能够准确指向此位置;另一方面是能够准确预测下一时刻目标位置,不然就会造成跟踪延迟。第一方面主要由APT系统图像处理算法精度、转台精度与控制带宽决定;第二方面主要靠控制算法滤波性能与轨迹预测的精度与可靠性决定。基于卡尔曼滤波的位置预测算法,要能够超前瞄准,提前给出控制量,避免跟踪过程的时间延迟[15-17]。
在无人机激光能量传输过程中,无人机作为合作目标会保持匀速运动,但由于气流干扰以及操作人员的手控误差,会造成无人机飞行中一定幅度的波动。同时,在图像跟踪过程中,由于无人机飞行方向的变化以及坐标系不同,在CCD视场中,无人机飞行呈现非匀速状态。
在APT系统中,将目标在图像中的坐标作为观测数据,并对其进行滤波,可以将3维的无人机飞行过程简化为2维对象。将干扰项作为随机加速度w2×1(k),图像处理的误差作为观测噪声v2×1(k),k为采样次数。
将水平方向的位置和速度以及纵向的位置和速度设置为状态向量,则状态向量为$\mathit{\boldsymbol{X}}\left( k \right) = {[\mathit{\boldsymbol{x}}\left( k \right)\;\;\mathit{\boldsymbol{\dot x}}\left( k \right)\;\;\mathit{\boldsymbol{y}}\left( k \right)\;\;\mathit{\boldsymbol{\dot y}}(k)]^{\rm{T}}}$。系统状态方程与观测方程如下:
$ \begin{array}{l} \left[ \begin{array}{l} \mathit{\boldsymbol{x}}\left( k \right)\\ \mathit{\boldsymbol{\dot x}}\left( k \right)\\ \mathit{\boldsymbol{y}}\left( k \right)\\ \mathit{\boldsymbol{\dot y}}(k) \end{array} \right] = \left[ \begin{array}{l} 1\;\;\;T\;\;0\;\;0\\ 0\;\;\;1\;\;\;0\;\;0\\ 0\;\;\;0\;\;\;1\;\;T\\ 0\;\;\;0\;\;\;0\;\;1 \end{array} \right]\left[ \begin{array}{l} \mathit{\boldsymbol{x}}\left( {k - 1} \right)\\ \mathit{\boldsymbol{\dot x}}\left( {k - 1} \right)\\ \mathit{\boldsymbol{y}}\left( {k - 1} \right)\\ \mathit{\boldsymbol{\dot y}}(k - 1) \end{array} \right] + \\ \;\;\;\;\;\;\;\;\;\;\left[ \begin{array}{l} 0.5{T^2}\\ \;\;T\\ \;\;0\\ \;\;0 \end{array} \right.\left. \begin{array}{l} \;\;0\\ \;\;0\\ 0.5{T^2}\\ \;\;T \end{array} \right]{\mathit{\boldsymbol{w}}_{2 \times 1}}\left( k \right) \end{array} $
(3) $ \mathit{\boldsymbol{Z}}\left( k \right) = \left[ \begin{array}{l} 1\;\;\;T\;\;0\;\;0\\ 0\;\;\;0\;\;\;1\;\;0 \end{array} \right]\left[ \begin{array}{l} \mathit{\boldsymbol{x}}\left( k \right)\\ \mathit{\boldsymbol{\dot x}}\left( k \right)\\ \mathit{\boldsymbol{y}}\left( k \right)\\ \mathit{\boldsymbol{\dot y}}(k) \end{array} \right] + {\mathit{\boldsymbol{v}}_{2 \times 1}}(k) $
(4) 式中,T为控制周期,k为采样次数,Z(k)为第k次采样对应的观测目标偏移量,v2×1(k)为零均值,σv2为图像处理过程中的白噪声的方差。由图 5计算得到σv2,w2×1(k)为零均值,σw2为包含转台动态跟踪误差、无人机飞行稳定性误差的白噪声的方差。
-
影响整个系统的电-光-电传输效率的环节主要包括:η1为激光器电光转换效率;η2为天线发射效率;η3为激光在空间中的传输效率;η4为入射光斑利用效率;η5为光电转换器的光电转换效率。激光无线能量传输系统传输效率为[18-19]:
$ \eta = {\eta _1} \cdot {\eta _2} \cdot {\eta _3} \cdot {\eta _4} \cdot {\eta _5} $
(5) -
激光器最大功率为700W,输出波长为(805±5)nm,光电转换效率约为49%。
-
对于发射光路而言,需要经过一系列的透镜将由光线接入的光束进行整形、准直和象散矫正。一般在增加增透膜的情况下,透镜的一个通光面透过率可实现99.9%透过率,而考虑到透镜本身吸收以及多透镜效应等,光学系统可实现大于98%透过率。
-
当激光通过大气时,由于大气分子及气溶胶粒子等散射元的作用而发生散射。纯散射不会引起激光总能量的损耗,但会改变在原来传输方向上的激光能量大小,同时改变激光能量的空间分布,进而影响接收功率。当大气中的粒子直径和激光波长相近时,发生米氏散射。米氏散射引起的衰减系数表达式为:
$ \mathit{\sigma } = \frac{{3.91}}{V}{\left( {\frac{\lambda }{{550}}} \right)^{ - q}} $
(6) 式中,V为大气能见度,λ为波长,q为修正因子。由大气散射引起的光功率衰减与距离的关系可表示为:
$ {I_r} = {I_0}{\rm{exp}}( - \mathit{\sigma }L) $
(7) 式中,L为传输距离,I0为激光发射功率,Ir为距离L处的光功率。由上式可得,当大气能见度为20km时,808nm波长的激光束经300m的距离后,散射损失5.8%,传输效率为94.2%。
-
入射光斑利用率包括两方面:(1)光电池板电池排布的占空比;(2)光电池板占入射光斑面积的比例。其中,光电池转换板选用较小的光电池封装进行设计,采用10mm×11mm光电池片,每个光电池片感光面积为10mm×10mm,在400mm直径光电池靶面中,共排布4×224片光电池,占空比约为90.9%。
发射光学系统中,激光束发散角为1mrad,在300m处光斑直径为500mm,光斑大于光电池板面积。由于入射光斑为斜入射,形状为椭圆形,因此仅有部分光斑入射在光电池板上。分别对转台仰角为70°, 60°, 45°, 30°时,300m处光斑的照射情况做了仿真模拟。图 6为转台仰角为60°时,在300m处设置直径500mm、法线垂直向地面的接收面的光照情况。由于光斑呈现高斯分布,所以在计算光电池板占光斑比例时乘以系数1.2。不同仰角下的光斑利用率见表 1。
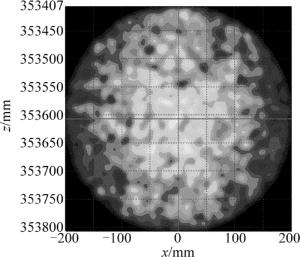
Figure 6. Spot exposure at pitch angle of 45°
Table 1. Spot utilization ratio at different elevation angles
70° 60° 45° 30° duty cycle of photocell/% 90.9 90.9 90.9 90.9 spot exposure ratio/% 85.3 82 73.6 60 incident spot utilization ratio/% 77.54 74.54 66.90 54.54 -
通过测量GaAs电池的开路电压和短路电流,结合填充因子可以获得47%的转换效率。
综上分析,取俯仰角为60°时,无人机激光无线能量传输系统的光电转换效率约为:
$ \begin{array}{l} \eta = {\eta _1} \cdot {\eta _2} \cdot {\eta _3} \cdot {\eta _4} \cdot {\eta _5} = 49\% \times 98\% \times \\ \;\;\;94.2\% \times 74.54\% \times 47\% = 15.85\% \end{array} $
(8) -
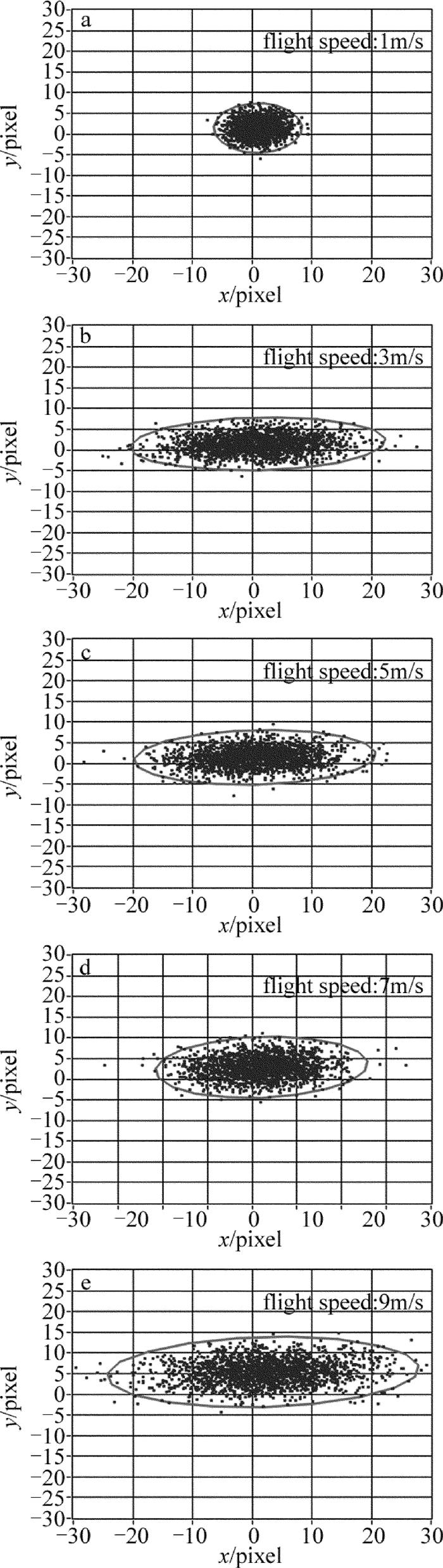
室外试验中,无人机选用大疆六旋翼无人机,能量传输距离L=300m,相机焦距f=350mm,CCD像元尺寸u=4.8μm,无人机光电池板直径D=400mm,激光光束直径Φ=500mm,激光器发射功率为400W。设全覆盖条件下允许的跟踪误差像素值为p,由公式p=(Φ-D)f/(2Lu)=12.15可知,想要将激光光束完全覆盖光电池板,系统标定后,光斑在图像中应持续位于半径为12.15pixel的圆中。图 7为不同飞行速度时跟踪过程中的信标光位置波动图。从图 7中可以看出, 大部分时间跟踪精度可以控制在20pixel内。不同飞行速度下跟踪效果数据见表 2。按照镜头参量与飞行距离计算,1pixel误差对应实际3.214mm误差。
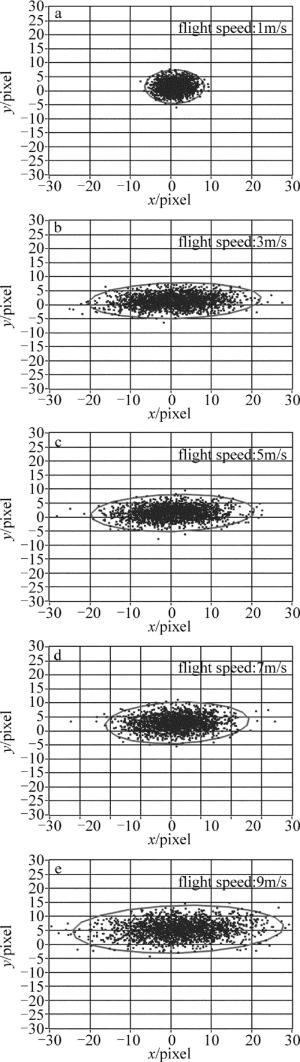
Figure 7. Tracking error data at different speeds
Table 2. Tracking error statistics at different velocities
error parameter velocity 1m/s 3m/s 5m/s 7m/s 9m/s horizontal error/pixel 5.28 15.25 29.55 41.67 99.43 horizontal error /cm 1.70 4.90 9.50 13.40 31.96 variance of horizontal error 6.63 52.19 182.62 404.246 1864.93 vertical error/pixel 4.23 4.32 5.12 6.07 9.85 vertical error /cm 1.36 1.39 1.65 1.95 3.17 variance of vertical error 4.82 4.62 4.83 6.34 8.35 degree of association 0.121 0.117 0.107 0.101 0.12 tracking error/cm 2.18 5.09 9.64 13.54 32.17 tracking accuracy/μrad 72.57 169.78 321.41 451.37 1070.56 从表 2可以得到,随着无人机飞行速度的增加,无人机的跟踪误差也随之增大,在实验中,当飞行速度在5m/s以内,能够保持较好的跟踪效果,当飞行速率超过9m/s后,跟踪效果就大大减低,甚至激光光束无法实时照射到光电池板。由于无人机是水平飞行,所以垂直方向y的误差比较理想,均满足完全覆盖的12.15pixel之内。从x,y相关度可以看出,在无人机飞行速度变化过程中,水平与垂直方向误差相关度变化不大,并且二者之间相关度系数较小、相关程度较弱。
在地面静止试验中,该光电池板在300m距离下的能量传输效率约为15%,在此基础上,进行了无人机在不同飞行速率下的跟踪能量传输效率实验,来观察整体APT系统的跟踪效果。每10次采样取平均值作为1个采样点,得到不同跟踪速率下的效率如图 8所示。从图中可以看出,随着速率的提高,能量传输效率下降的比较明显,并且稳定性越来越差。根据光电池板静态对准时能量传输效率15%的能力计算,在1m/s, 3m/s, 5m/s, 7m/s, 9m/s的飞行速率下,电池板的覆盖情况分别为97.33%, 88.67%, 77.33%, 58.05%, 32.00%。图 8为实验过程中无人机接收到能量后通过大功率LED灯将功率消耗。图 9为室外试验系统图。
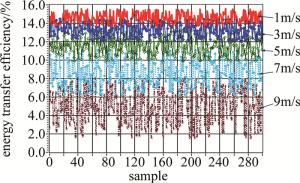
Figure 8. Energy transfer efficiency at different velocities

Figure 9. Laser energy transmission system diagram
-
本文中给出了无人机激光能量传输APT系统较为详细的设计方案,通过自适应ROI设计减少系统噪声,提高算法运算速度,在目标轨迹预测中将转台自身误差与目标飞行稳定性误差考虑在内,增加了系统跟踪精度。同时给出了无人机激光无线能量传输系统中系统传输效率的计算方法,该方法在后续试验中通过验证与实际结果较为贴合。最终实验结果表明,该APT系统在18km/h飞行速率下能够达到320μrad的跟踪精度,在无人机飞行过程中实时进行充电。本文为无人机激光无线能量传输工程化应用提供了设计方案与原理样机实验,具有重要参考意义。
无人机激光无线能量传输APT系统跟踪设计
Tracking design of APT system of laser wireless energy transmission for unmanned aerial vehicle
-
摘要: 无人机激光无线能量传输捕获、瞄准、跟踪(APT)系统是系统接收端获得稳定能源的保障。为了解决能量传输过程中充电链路高效可靠的问题, 结合无人机激光能量传输系统特点及实际需求, 在设计中建立自适应感兴趣区域, 提高图像处理速度, 降低噪声, 准确提取目标坐标; 综合考虑多重误差后通过Kalman预测算法实现稳定跟踪, 并根据系统特点提出了系统功率传输效率的计算方案。结果表明, 当无人机飞行速率在18km/h内, 该APT系统能够在300m~500m距离准确跟踪无人机, 跟踪精度在320μrad内。该方案能够保证激光能量传输过程的跟踪精度与可靠性。Abstract: The acquisition, pointing and tracking (APT) system of laser wireless energy transfer for unmanned aerial vehicles (UAV) is the guarantee of stable energy at the receiving end of the system. In order to solve the problem of high efficiency and reliability of charging link in energy transmission process, considering the characteristics and practical requirements of UAV laser energy transmission system, an adaptive region of interest was established in the design for improving image processing speed, reducing noise and accurately extracting target coordinates. Considering multiple errors, Kalman prediction algorithm was used to achieve stable tracking. According to the characteristics of the system, the calculation scheme of power transmission efficiency of the system was put forward. The results show that, when the flight speed of UAV is within 18km/h, APT system can track the UAV accurately from 300m to 500m. The tracking accuracy is within 320μrad. The scheme can ensure the tracking accuracy and reliability of laser energy transmission process.
-
Table 1. Spot utilization ratio at different elevation angles
70° 60° 45° 30° duty cycle of photocell/% 90.9 90.9 90.9 90.9 spot exposure ratio/% 85.3 82 73.6 60 incident spot utilization ratio/% 77.54 74.54 66.90 54.54  下载: 导出CSV
下载: 导出CSV
Table 2. Tracking error statistics at different velocities
error parameter velocity 1m/s 3m/s 5m/s 7m/s 9m/s horizontal error/pixel 5.28 15.25 29.55 41.67 99.43 horizontal error /cm 1.70 4.90 9.50 13.40 31.96 variance of horizontal error 6.63 52.19 182.62 404.246 1864.93 vertical error/pixel 4.23 4.32 5.12 6.07 9.85 vertical error /cm 1.36 1.39 1.65 1.95 3.17 variance of vertical error 4.82 4.62 4.83 6.34 8.35 degree of association 0.121 0.117 0.107 0.101 0.12 tracking error/cm 2.18 5.09 9.64 13.54 32.17 tracking accuracy/μrad 72.57 169.78 321.41 451.37 1070.56
下载: 导出CSV
-
[1] CHENG K, DONG H, CAI Zh R, et al. Design of high efficiency long distance laser power transmission [J]. Spacecraft Engineering, 2015, 24(1):8-12(in Chinese). [2] FAKIDIS J, VIDEEV S, KUCERA S, et al. Indoor optical wireless power transfer to small cells at nighttime [J]. Journal of Lightwave Technology, 2016, 34(13): 3236-3258. doi: 10.1109/JLT.2016.2555883 [3] YANG H, LU J, ZHOU D Y, et al. Experimental study about effect of 1070nm CW laser irradiation on three-junction GaAs solar cells[J]. Laser Technology, 2017, 41(3): 318-321(in Chinese). [4] WANC C, MA Z. Design of wireless power transfer device for UAV[C]//IEEE International Conference on Mechatronics and Automation. New York, USA: IEEE, 2016: 2449-2454. [5] YING J J, CHEN Y D, WU D Sh, et al. The UAV LSER charging tracking precision analysis[J]. Semiconductor Optoelectronics, 2018, 39(4): 569-574(in Chinese). [6] TANG L, ZHONG Y Ch, ZHANG Ch X, et al. Research situation and development trend of laser wireless power transmission key technology[J]. Laser Journal, 2017 38(10): 28-32(in Chinese). [7] FAKIDIS J, VIDEV S, KUCERA S, et al. Indoor optical wireless power transfer to small cells at nighttime [J]. Journal of Lightwave Technology, 2016, 34(13): 3236-3258. doi: 10.1109/JLT.2016.2555883 [8] LI Zh P, ZHANG Y G, AI Y, et al. Laser tracking and wireless power supply system for unmanned aerial vehicles[J]. Laser Technology, 2018, 42(3):306-310(in Chinese). [9] QIAO L, YANG Y N. Experimental research of laser wireless power transmission efficiency[J]. Laser Technology, 2014, 38(5): 590-594(in Chinese). [10] NUCENT T, KARE J, BASHFORD D, et al. 12-hour hover: Flight demonstration of a laser powered quadrocopter [C]//AUVSI Unmanned Systems North America. Washington DC, USA: Curran Associates Inc, 2011: 906-924. [11] ZHOU W, JIN K. Efficiency optimization inject current characteristic of laser diode for wireless power transmission [C]//IEEE Energy Conversion Congress and Exposition. New York, USA: IEEE, 2015: 3082-3086. [12] LI M, AI Y, CAO Y. Research of fine tracking servo system for FSO terminal[J]. Laser Technology, 2009, 33(3): 262-265(in Chin-ese). [13] ZHOU W Y, JIN K. Status and trends of laser powered unmanned aerial vehicles[J]. Journal of Nanjing University of Aeronauties & Astronauties, 2013, 45(6): 784-791(in Chinese). [14] LI Zh Y, SHI D L, SHEN J Sh, et al. Laser-based wireless energy transmission technology [J]. Space Electronic Technology, 2013, 43(3):71-76(in Chinese). [15] MIAO X, ZHANG D B, SONG Y H, et al. UAV precise recycling technology based on laser terminal guidance[J]. Laser Technology, 2018, 42(5): 687-691(in Chinese). [16] HE Sh, ZHAO X, SHI X. Improved strong tracking quadrature kalman filtering algorithm[J]. Computer Technology and Development, 2018, 28(7): 43-47(in Chinese). [17] TIAN J L, HU X Y, YOU A Q. Compound control of photoelectric tracking by using adaptive Kalman filtering algorithm[J]. Optics and Precision Engineering, 2017, 25(7): 1941-1947(in Chin-ese). [18] WU Zh N, XIE J R, YANG Y N. Design and implementation of beam shaping for high power semiconductor lasers[J]. Laser Technology, 2017, 41(3): 416-420(in Chinese). [19] LIU X G, HUA W Sh, LIU X, et al. Methods to improve efficiency of photovoltaic receiver for laser powered unmanned aerial vehicle[J]. Infrared and Laser Engineering, 2016, 45(3): 0306002 (in Chinese). doi: 10.3788/irla201645.0306002 -

 点击查看大图
点击查看大图

图(9) / 表(2)
计量
- 文章访问数: 6138
- HTML全文浏览量: 4436
- PDF下载量: 22
- 被引次数: 0
